
According to the structure and working principle of the motor, we can divide the motor into brushed motor, inner rotor brushless motor and outer rotor brushless motor.

Brushed motor: Also known as DC motor or carbon brush motor, it is the oldest motor type and the most numerous motor type at present. When the motor is working, the coil and the commutator rotate, but the magnetic steel and the carbon brush do not rotate. The alternating change of the current direction of the coil is accomplished by the commutator and brush that rotate with the motor. This kind of motor has the advantages of relatively low cost, high torque, simple structure and easy maintenance. However, due to structural limitations, the disadvantages are also relatively obvious:
- The sparks generated by the mechanical commutation cause friction between the commutator and the brush, electromagnetic interference, high noise, and short life.
- The structure is complex, the reliability is poor, and there are many faults, which require frequent maintenance.
- Due to the existence of the commutator, the further decrease of the rotor inertia is limited and the dynamic performance is affected.
Therefore, in the model world, it is mainly used on car models and ship models that are slow and insensitive to vibration, and aircraft models rarely use brushed motors.

Brushless motor: Brushless DC motors do not use mechanical brush devices, but use square wave self-controlled permanent magnet synchronous motors. Hall sensors are used instead of carbon. The brush commutator uses NdFeB as the permanent magnet material of the rotor, which has a great advantage in performance compared with the general traditional DC motor. It has the advantages of high efficiency, low energy consumption, low noise, long life, high reliability, servo control, no gra frequency conversion speed regulation, etc. For the disadvantage, it is more expensive than the brushed motor, and it is not easy to maintain. It is widely used in model aircraft, high-speed car model and ship model.
However, a single brushless motor is not a complete power system, and the brushless must be controlled by a brushless controller, that is, an ESC to achieve continuous operation. Ordinary carbon brush motors rotate the windings, while brushless motors rotate magnets whether they have an outer rotor structure or an inner rotor structure. Therefore, each motor is composed of a stator and a rotor.
The stator of the brushless motor is the part that generates the rotating magnetic field, which can support the rotor to rotate. It is mainly composed of silicon steel sheets, enameled wires, bearings, and supports; while the rotor is pasted with NdFeB magnets and rotates under the action of the stator's rotating magnetic field. It is mainly composed of rotating shaft, magnet and support. In addition, the number of pole pairs composed of stator and rotor also affects the speed and torque of the motor.
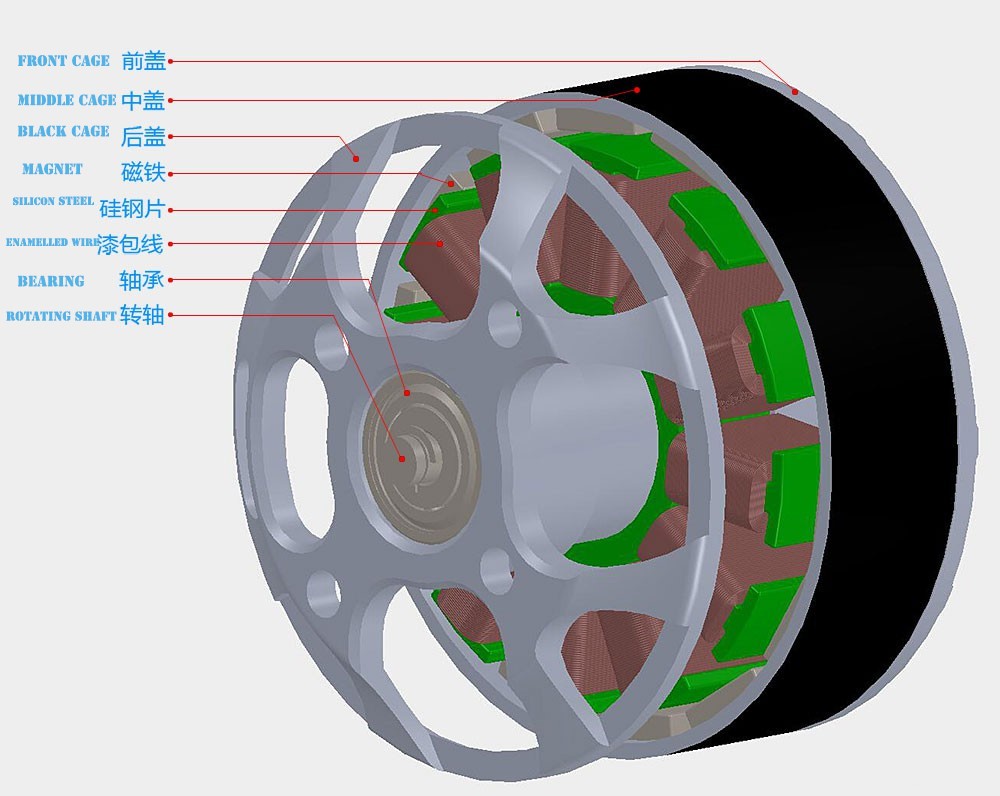
The front cover, middle shell and rear cover of the brushless motor are mainly integral structural parts, which play the role of constructing the overall structure of the motor. However, the shell of the outer rotor brushless motor is also the magnetic path of the magnet, so the shell must be made of magnetically conductive material. The outer casing of the inner rotor is only a structural member, no special materials required. However, the inner rotor motor has one more rotor core than the outer rotor motor, and the function of this rotor core also plays the role of the magnetic circuit path.
Magnet: It is installed on the rotor and is an important part of the brushless motor. Most of the performance parameters of the brushless motor are related to the magnet, including power, speed, torque, etc.
Silicon steel sheet: It is an important part of the slotted brushless motor. Of course, the slotless brushless motor does not have silicon steel sheet, but most of the current brushless motors are slotted. Its function is mainly to reduce the magnetic resistance and participate in the magnetic circuit operation.
Rotating shaft: It is the direct force-bearing part of the rotor of the motor. The hardness of the rotating shaft must meet the requirements of high-speed rotation of the rotor.
Bearing: It is the guarantee for the smooth operation of the motor. There are sliding bearings and rolling bearings, and rolling bearings can be subdivided into ten categories such as deep groove ball bearings, needle roller bearings and angular contact bearings. At present, most brushless motors are All use deep groove ball bearings.
How a brushless DC motors work

The power system of brushless DC motor consists of three parts: rotor, stator and position sensor. The position sensor commutates the current of the stator winding along a certain order according to the change of the rotor position (that is, detects the position of the rotor magnetic pole relative to the stator winding, and generates a position sensing signal at the determined position, which is processed by the signal conversion circuit. To control the power switch circuit, the winding current is switched according to a certain logical relationship). The operating voltage of the stator winding is provided by an electronic switching circuit controlled by the output of the position sensor.
There are three types of position sensors: magnetic, photoelectric and electromagnetic
The DC brushless motor using the magnetic-sensitive position sensor, its magnetic-sensitive sensor device (such as Hall element, magnetic-sensitive diode, magnetic-sensitive pole tube, magnetic-sensitive resistor or special integrated circuit, etc.) To detect changes in the magnetic field generated by the rotation of permanent magnets and rotors.
The DC brushless motor using the photoelectric position sensor is equipped with a photoelectric sensor device at a certain position on the stator assembly, the rotor is equipped with a shading plate, and the light source is a light-emitting diode or a small light bulb. When the rotor rotates, due to the action of the shading plate, the photosensitive components on the stator will intermittently generate pulse signals at a certain frequency.
The brushless DC motor with electromagnetic position sensor is equipped with electromagnetic sensor components (such as coupling transformer, proximity switch, LC resonance circuit, etc.) on the stator assembly. When the position of the permanent magnet rotor changes, the electromagnetic effect will make the electromagnetic sensor A high-frequency modulated signal is generated (the amplitude of which varies with rotor position).
Simply put, the brushless DC motor relies on changing the alternating frequency and waveform of the current wave input to the stator coil of the brushless motor to form a magnetic field around the winding coil that rotates around the geometric axis of the motor. This magnetic field drives the rotor on the rotor. When the permanent magnet magnet rotates, the motor rotates. The performance of the motor is related to factors such as the number of magnets, the magnetic flux of the magnet, and the input voltage of the motor, as well as the control performance of the brushless motor. It is direct current, and the current needs an electronic governor to turn it into 3-phase alternating current. It also needs to receive a control signal from the remote control receiver to control the speed of the motor to meet the needs of the model.
In general, the structure of the brushless motor is relatively simple, and the brushless electronic governor (that is, the ESC) really determines its performance. A good ESC needs to have a microcontroller control program design, circuit design, complex The overall control of the processing technology and other processes, so generally speaking, the price is much higher than that of the brushless motor.
Professional terms in brushless motors
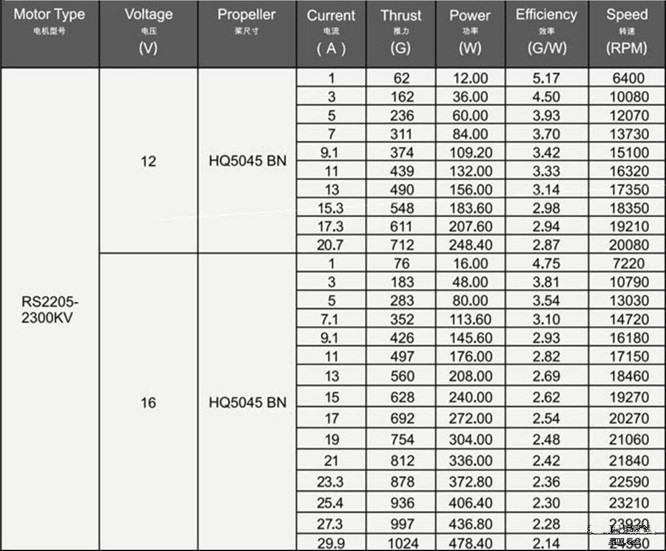
Rated voltage: that is, the suitable working voltage of the brushless motor. In fact, the suitable working voltage of the brushless motor is very wide, and the rated voltage is obtained by specifying the load conditions. For example, a 2212-850KV motor specifies a load of 1045 propellers, and its rated operating voltage is 11V. If the load is reduced, such as with a 7040 propeller, the motor can work at 22V. However, this working voltage is not infinitely rising, and is mainly limited by the highest frequency supported by the electronic controller. Therefore, the rated work is determined by the working environment.
KV: The brushless DC motor is marked with the rated speed according to the rated working voltage. The brushless motor introduces the concept of KV value, so that the user can intuitively know the specific speed of the brushless motor under the specific working voltage. Actual speed = KV value * working voltage, this is the actual meaning of KV, that is, the speed per minute under 1V working voltage. The speed of the brushless DC motor is proportional to the voltage, and the speed of the motor will increase linearly with the increase of the voltage. For example, the speed of a 2212-850KV motor under 10V voltage is: 850*10=8500RPM (RPM, revolutions per minute)
Torque: The driving torque generated by the rotor in the motor can be used to drive the mechanical load. We can understand the power of the motor.
Speed: The speed of the motor per minute, generally expressed in RPM.
Maximum current: The maximum current that the motor can withstand and work safely
Maximum power: the maximum power that the motor can withstand and work safely Power = voltage * current
Brushless Motor Power and Efficiency
We can simply understand that the motor output power = speed * torque, under the same power, torque and speed are a trade-off relationship, that is, the higher the speed of the same motor, the lower the torque must be, on the contrary Also still. It is impossible to require a motor to have a higher speed and a higher torque. This rule applies to all motors. For example: a 2212-850KV motor can drive 1045 propellers at 11V. If the voltage is doubled, its speed will also double. If the load is still 1045 propellers at this time, the motor will quickly change due to current and temperature. The sharp rise and burnt.
Each motor has its own upper limit of power, and the maximum power is this upper limit. If the working conditions exceed this maximum power, the motor will be burned at high temperature. Of course, this maximum power is also obtained when the working voltage is specified. If it is at a higher working voltage, the reasonable maximum power will also increase. This is because: Q=I2R, the heating of the conductor is proportional to the square of the current. At a higher voltage, if it is the same power, the current will drop, resulting in a reduction in heating and an increase in the maximum power. This also explains why a large number of 22.2V or even 30V batteries are used to drive multi-rotor aircraft in professional aerial photography aircraft. The brushless motor under high voltage has low current, low heat generation and higher efficiency.
People often ask: What is the difference between 2208 1000KV and 2216 1000KV, both are 1000KV, aren't they the same? Oh, the difference is huge.
In the case of the same motor diameter and KV value, the higher the motor's natural power, the greater the load that the motor with higher power can naturally drive. For example, a man 100 jins, a man 160 jins, you ask them to carry a bag of 50 jins of rice, although a 100 jins man is a little hard, but he can carry it, a 160 jins man thinks it is a side dish. But what if they were asked to carry two bags of rice? A 160-pound man gritted his teeth and carried it up, and a 100-pound man might not be able to straighten his waist. This is their difference. For the motor, the easier the work, the higher the efficiency. Using the previous theory, the iron consumption is also low and the copper consumption is low.
Remember this formula: Torque is proportional to the square of the current
As the motor gets more and more tired, its efficiency decreases rapidly. Therefore, when choosing a multi-axis motor, you must choose a suitable power motor and a propeller that matches it, so that the motor can work in a relatively relaxed state. Generally speaking, the working power when hovering is between 30-45% of the maximum power. No calf can pull the cart, and no big ox can pull the cart.
The relationship between brushless motor voltage and efficiency
First the two formulas:
- Power = voltage * current
- Calorific value = square of current * resistance
Two conclusions are drawn from the formula: under the same power, the higher the voltage, the smaller the current, and it is deduced that: under the same power, the higher the voltage, the smaller the calorific value. Finally, it is concluded that the same aircraft, the higher the voltage used, the smaller the current and the less heat, and the higher the efficiency.
Now you know why high-voltage wires need to be on high voltages of 100KV or even 220KV, 550KV (this KV is kilovolts).
Of course, the aircraft needs batteries to drive, to be precise, lithium batteries. The number of lithium batteries naturally depends on the size of the battery. The larger the battery, the higher the voltage. So in terms of voltage, we can actually do not much, because many batteries on the market are serialized, such as 450 models, you can find 6S batteries for 450 helicopters, but the price is very high, And the price of the ESC is also higher. So in terms of voltage, what we should do is: try to avoid using low-voltage batteries for large models, which will cause the operating current to be relatively high, resulting in large copper consumption. At the same time, it is also necessary to avoid high-voltage batteries used in small aircraft, as the weight of the batteries is too large.
Number of pole pairs of brushless motors
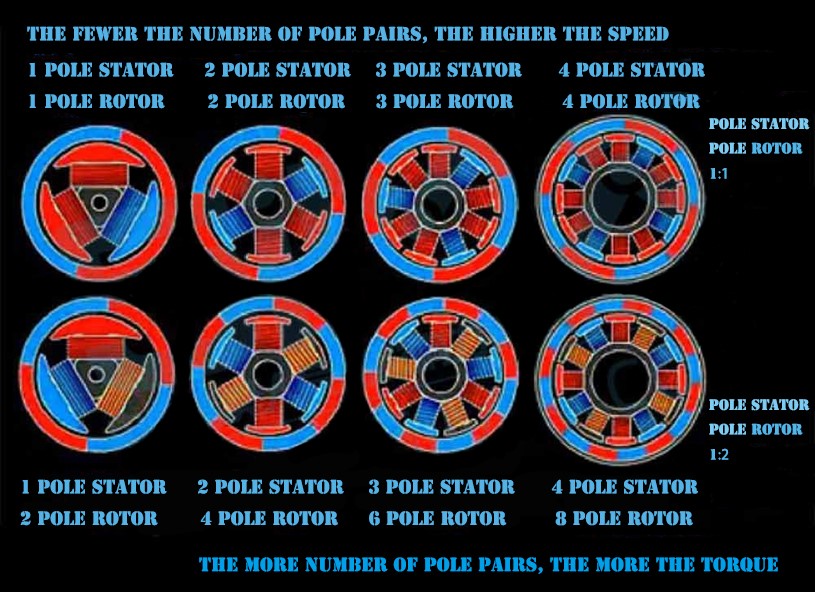
The rotation speed of the magnetic field is also called the synchronous speed, which is related to the frequency of the three-phase current and the number of pole pairs p. If the stator winding has only one pair of magnetic poles at any time (the number of pole pairs p=1), that is, there are only two magnetic poles, for the rotating magnetic field with only one pair of magnetic poles, the three-phase current changes once, and the combined magnetic field also changes with For one rotation, if it is an alternating current of 50hz, the synchronous speed of the rotating magnetic field is 50 rpm or 3000 rpm. In engineering technology, r/min is often used to represent the speed. If the magnetic field synthesized by the stator winding has two pairs of magnetic poles (the number of pole pairs p=2), that is, there are four magnetic poles, it can be proved that the current changes for one cycle, and the synthesized magnetic field rotates 180 degrees in space. The synchronous speed per minute of the magnetic pole rotating magnetic field is n=60f/p.
When the number of pole pairs is constant, if the frequency of the alternating current is changed, the synchronous speed of the rotating magnetic field can be changed, which is the basic principle of variable frequency speed regulation. Since the magnetic poles of the motor appear in pairs, they are also often expressed in pole pairs.
Brushless motors magnets

Almost 100% of the brushless motors in the mold world use the "magnet king" - NdFeB magnets. It is well-deserved to use the magnet king to describe NdFeB magnets. NdFeB magnets are common black ferrites in our lives. Magnets are 3 times more magnetic! Of course, the price is more than 10 times that of ferrite magnets. The brushless motor finally belongs to the permanent magnet motor, and the power, characteristics and other characteristics of the permanent magnet motor completely depend on the magnet. Basically, it can be said that the size and grade of the magnet determine the maximum power of the motor.
In addition, there are differences in the shape of the magnets. If you disassemble some cheap motors, you will find that most of the magnets are in the shape of square sheets. Square-shaped magnets are easy to process and relatively cheap, and naturally become the best choice for cost-effective motors. Many brands of motors choose arc magnets. The arc can ensure that the air gap between the magnet and the silicon steel sheet is always consistent. It seems that the power and efficiency are better than the square magnet. However, after dismantling some motors, so-called bread-shaped magnets were also found. They can be completely attached to the iron shell, but the distance from the silicon steel sheet is the same as that of the square magnet, which is not the same. Regarding this kind of magnet, I have consulted some professional people in the industry, and they are convinced that this kind of magnet is even better than the arc magnet, so I will not make a conclusion here.
However, there is another situation in which it is possible to use square magnets. In brushless motors with multiple slots and multiple poles (such as 36-slot 42-pole motors), square magnets are basically used because the diameter of the iron shell is large. , the square magnet can also be well bonded to the iron shell, and the air gap with the silicon steel sheet is also very uniform.
Silicon steel sheet of brushless motor
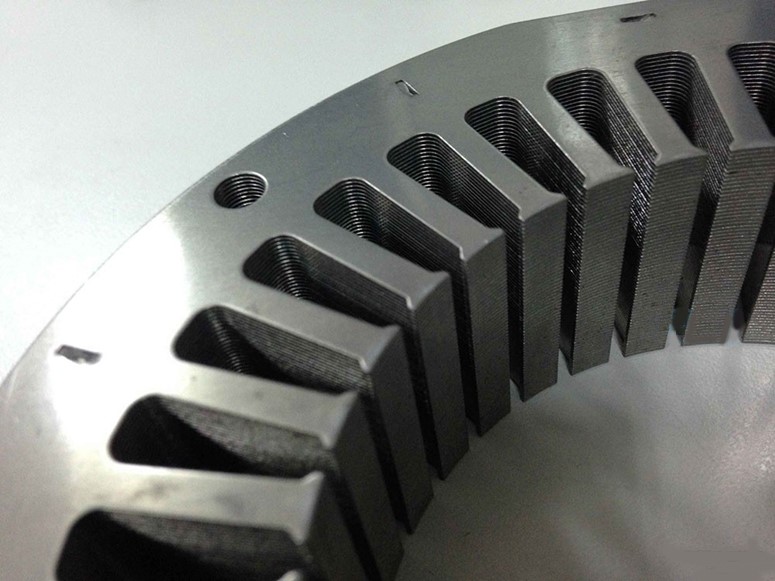
Air is weakly magnetically permeable, but iron is magnetically permeable. The function of the silicon steel sheet is to guide the magnetic circuit of the magnet and form a loop, which requires that the reluctance of the motor (everyone can understand it as resistance) is relatively small. But everyone has seen it, why is the stator made up of pieces?
Do you know the principle of the induction cooker? Why does the iron pan get hot when you put it on the induction cooker? In fact, this is because the material similar to iron is placed in the rapidly changing electromagnetic field (think about alternating current, that electricity is instantaneous Flying around, unlike direct current, which is always positive to negative, it will generate eddy current loss and generate heat, and the higher the frequency, the greater the heat generation. The silicon steel sheet is in the rotating magnetic field of the motor, which is the same problem as the iron pot placed on the induction cooker. The solution is to add silicon to the steel and make it into thin sheets. In theory, the thinner the silicon steel sheet, the eddy current generated less loss.
So do you understand the reason why ordinary fixed-wing motors are mostly thick 0.35MM silicon steel sheets, while helicopters and duct motor motors mostly use 0.2MM silicon steel sheets? The faster the motor rotates, the faster the magnetic field changes, then Eddy current losses are greater. Most of the multi-axis motors now use 0.2MM single-piece silicon steel sheet, so the iron loss of the motor will be lower.
Why does the high KV motor get very hot under the condition of full throttle idling?
The answer is: it is not the copper wire that generates the heat, because there is very little current flowing through it. It is the eddy current loss and hysteresis loss that generate heat, because at this time the motor is completely no-load, the speed is relatively high, and the eddy current loss is large, and all the losses eventually become heat.
Brushless motor usage and maintenance
The brushless DC motor consists of a motor body and a driver. It is a typical mechatronic product and has been widely used in many fields. There are some problems that users need to pay attention to when using brushless DC motors, so what should be paid attention to when using brushless DC motors?
(1) Before disassembly, use compressed air to blow off the dust on the surface of the motor, and wipe the surface dirt.
(2) Select the work site where the motor disintegrates and clean up the site environment.
(3) Familiar with the structural characteristics and maintenance technical requirements of the motor.
(4) Prepare the necessary tools (including special tools) and equipment for dismantling.
(5) In order to further understand the defects in the operation of the motor, an inspection test can be done before disassembly if conditions permit. To this end, put the motor on the load for a test run, check the temperature, sound, vibration, etc. of each part of the motor in detail, and test the voltage, current, speed, etc., and then disconnect the load, and do a no-load inspection test separately. Carry current and no-load loss, make a record.
(6) Cut off the power supply, remove the external wiring of the motor, and make a record.
(7) Use a megohmmeter with a suitable voltage to test the insulation resistance of the motor. In order to compare the insulation resistance value measured in the last inspection to judge the change trend and insulation state of the motor insulation, the insulation resistance values measured at different temperatures should be converted to the same temperature, generally converted to 75°C.
(8) Test the absorption ratio K. When the absorption ratio is greater than 1.33, it indicates that the motor insulation has never been damp or the damp degree is not serious. In order to compare with previous data, it is also necessary to convert the absorption ratio measured at any temperature to the same temperature.
Recommend rc cars for RC car enthusiasts Click the images to buy
YK4072 1/7 SCT DF7


